
Mostrando entradas con la etiqueta Can Planas. Mostrar todas las entradas
Mostrando entradas con la etiqueta Can Planas. Mostrar todas las entradas
lunes, 17 de febrero de 2025
Proyecto de robot semicartesiano
Con la idea de robotizar la colocación de las fichas en el juego del tres en raya he diseñado este mecanismo que desplaza el cabezal en donde se situará el electroimán que recoja y deje las fichas para colocarlas en las diferentes posiciones del tablero. Las piezas para imprimir en 3D se pueden encontrar en Thingiverse.

miércoles, 8 de enero de 2025
Ascensor de tres pisos controlado con Arduino
Este ascensor está movido mediante un tambor que enrolla y desenrolla la cuerda que mueve la cabina arriba y abajo. Este tambor gira movido por un par de engranajes, en donde el piñón es accionado por un motor paso a paso 28BYJ-48. La cabina del ascensor va guiada en dos varillas de aluminio de 4 milímetros de diámetro y 423 milímetros de largo. Las piezas para imprimir en 3D se pueden encontrar en Thingiverse. En cada piso se encuentran un pulsador para llamar al ascensor y el final de carrera que detecta su llegada.

martes, 12 de noviembre de 2024
Automatización de un invernadero
Trabajo de investigación de bachillerato
Como sensores utilizaron el sensor de luz UV LTR 390 de Adafruit con comunicación por I2C, el sensor digital de temperatura y humedad DHT22 y un sensor de humedad del suelo Gravity Capacitive soil moisture sensor v1.0.
martes, 25 de junio de 2024
Modelado de una maqueta de automóvil
El objetivo es diseñar un modelo de la carrocería de un Seat León, para estudiar su comportamiento en el túnel de viento.

Este es el proceso que he seguido para una primera aproximación utilizando el Sketchup Web. El primer paso será conseguir un primer modelado a partir de un bloque sobre el que dibujamos su perfil lateral y mediante extrusión eliminamos el material sobrante.

miércoles, 22 de febrero de 2023
Caja para un regulador de luz
Para regular el voltaje de salida de la fuente de alimentación casera le he colocado un regulador de luz a la entrada y para alojar este regulador le he construido una caja con la impresora 3D.


martes, 21 de febrero de 2023
Accionamiento del motor paso a paso del lector de un CD
Con la fuente de alimentación casera he alimentado la entrada del driver L298N que por medio de un Arduino UNO mueve el pequeño motor paso a paso bipolar MMB PL15S-020-YTE7 (TA2905F) de un antiguo lector de CDs. Estos motores funcionan con 5 voltios por lo que se ha de bajar el voltaje que proporciona la fuente de alimentación. Si el voltaje es muy pequeño no llega a mover el motor paso a paso o lo mueve, pero con tan poco par que no puede arrastrar mecanismo alguno, si el voltaje es muy alto se calienta mucho con riesgo de quemarse.
Para el control de este voltaje se han de retirar los puentes jumpers ENA y ENB que conectan estos pines directamente a 5 voltios. Si en vez de 5 voltios se hace llegar a estos pines un voltaje más pequeño, la salida de motores no será de los 17 voltios de la fuente de alimentación sino algo menor. Haciendo pruebas he conseguido que hacia los motores salgan 7 voltios. A estos pines ENA y ENB del driver le hacemos llegar una señal PWM (analogWrite) desde Arduino. Un valor analógico 255 dejará el voltaje de salida a los motores a 17 voltios y un valor 0 sin tensión. para conseguir esos 7 voltios de salida el valor del analogWrite ha de ser de 50.

Fuente de alimentación casera
A partir de un transformador FADISEL con salida a 12 y 9 voltios y 2 A de intensidad y cuatro diodos 16F120 he montado una rudimentaria fuente de alimentación. Para la caja he imprimido las piezas en 3D.


viernes, 17 de febrero de 2023
Control de un motor paso a paso con L298N y Arduino
Control de un motor paso a paso bipolar
Se trata de controlar un motor paso a paso bipolar con un driver L298N y Arduino. Este driver es capaz de controlar también un motor paso a paso unipolar si se conecta en configuración bipolar, obviando los cables del tab central de las bobinas del motor. El máximo consumo es de 2 amperios.

lunes, 13 de febrero de 2023
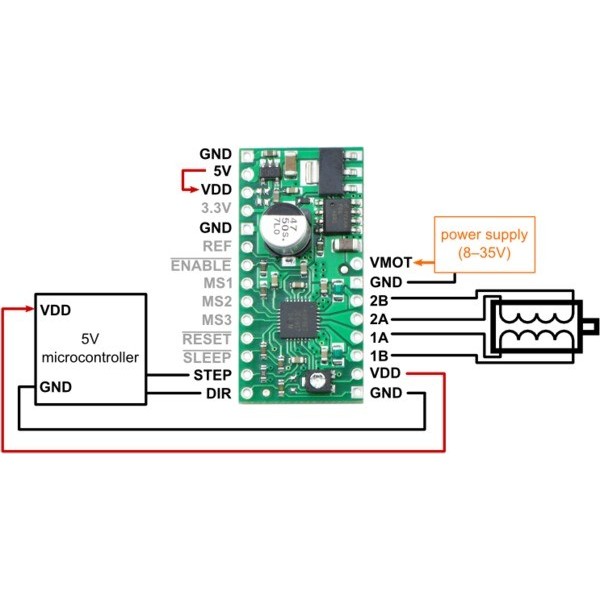
Motor paso a paso controlado con Arduino
El A4988 es un controlador (driver) de motores paso a paso, para su uso desde un microcontrolador Arduino o similar. Estos controladores permiten controlar los altos voltajes e intensidades que requieren estos motores, limitar la corriente que circula por el motor, y proporcionan las protecciones para evitar que la electrónica pueda resultar dañada. Para su control únicamente requieren dos salidas digitales, una para indicar el sentido de giro y otra para comunicar que queremos que el motor avance un paso. Además permiten realizar microstepping, una técnica para conseguir precisiones superiores al paso nominal del motor.
jueves, 5 de diciembre de 2019
jueves, 28 de noviembre de 2019
Elevador de bolas de espiral
Con mis alumnos estamos construyendo este elevador de bolas con espiral de alambre movido con un motorreductor de OPITEC.

lunes, 1 de julio de 2019
Cuatro generaciones de vehículo oruga
En la fotografía se pueden ver cuatro modelos de vehículo oruga. Uno con orugas de cinta de tela, otro con eslabones de madera, un tercero con piezas impresas en 3D, y el último, un kit chino.


domingo, 12 de mayo de 2019
ROBOLOT 19
El equipo formado por Lorgi Espinosa, Alex Iuhastich y David Poveda ha participado hoy en la jornada de competición de robots educativos ROBOLOT 2019, en la categoría de proyectos de robótica, autoconstruidos. Han logrado un diploma y un premio consistente en un robot Keyestudio KEYBOT.

domingo, 7 de abril de 2019
Lucha de robots en el Cosmocaixa de Barcelona
El 22 de febrero pasado se realizó en el Cosmocaixa una muestra de trabajos realizados con Arduino. Estos robots controlados por bluettooth eran muy activos.
sábado, 6 de abril de 2019
Elevador de bolas
En este proyecto se han realizado las piezas en la impresora 3D. Los movimientos los impulsan dos servos controlados con un Arduino UNO.

Un skip eleva la bola que deja caer en una ligera rampa y es retenida por un mecanismo circular para permitir que el skip pueda volver al punto inferior y volver a cargar la misma bola.
miércoles, 27 de marzo de 2019
Mercado de Tecnología del Vallès
Esta mañana, en el vestíbulo del edificio histórico de la UPC se ha realizado la exposición del Mercat de Tecnologia del Vallès que ha reunido proyectos de muchos institutos de la zona.

viernes, 21 de diciembre de 2018
Proyectos tecnológicos
Unos alumnos de mi compañera Gloria han hecho estos dos proyectos tecnológicos para su trabajo experimental de segundo curso de bachillerato. Uno de ellos es un plotter controlado con Arduino. El otro es un pequeño robot con sensor de distancia y control por bluetooth.

viernes, 22 de junio de 2018
Central eléctrica
Hace unos días hemos acabado el proyecto de maqueta de central eléctrica con máquina de vapor de triple expansión y alternador, con piezas hechas con la impresora 3D.

Los archivos del diseño y los necesarios para la impresión de las pieras en 3D para la máquina de vapor se pueden encontrar en Thingiverse. También se pueden ver los correspondientes al generador eléctrico y al edificio.
Suscribirse a:
Comentarios (Atom)